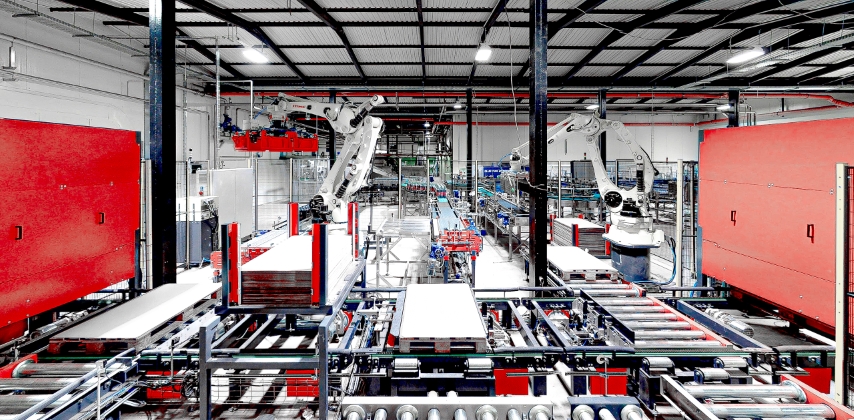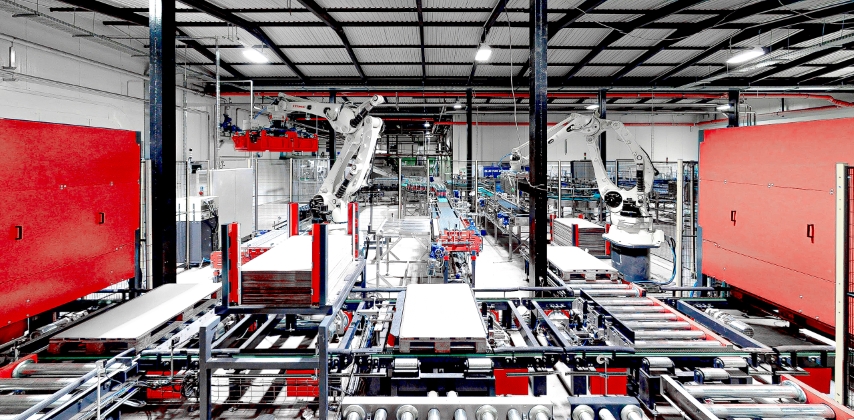
Following previous news, last part of our Pivovara Daruvar Project in Croatia is a complex palletizing system based on two Kawasaki robots.
To recall, the client wanted us to project and implement two complete beer filling lines for aluminum cans and PET bottles by putting them in old building with one existing customer’s line – for returnable glass bottles in cases. We went few steps further, inventing a way that this project would give much more to the investor, and we made a layout that tied the beginning and the end of line with two end-of-lines by STM.
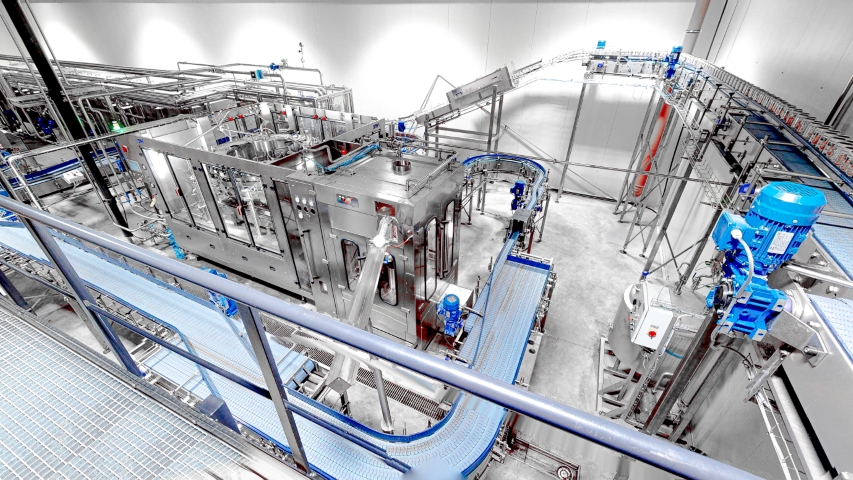
This meant that apart from palletizing packages of cans and PET bottles we were able to offer our client an automatic depalletizing of cases with empty bottles returning to the brewery, as well as palletizing full cases with freshly filled glass beer bottles. Due to the importance of canned beer for our client, we decided to design this system so that the canning line could work independently, using one Kawasaki robot and one gripper, while the PET line could work alternatively with returnable glass line – which was also fine for the client because of having one bright beer tank (BBT) for both these lines. In the end we’ve offered two functions more than expected: depalletizing crates with glass bottles returning to the brewery with capacity of 20000 bph and palletizing cases with full bottles while still being able to meet the required capacities of palletizing can line 15000cph and PET bottle line 3000bph.
A very important matter in this project was also to create a logic of automatic EUR pallet movement inside of the system that has one inlet – during empty bottle crates depalletizing, and needs empty pallets for can palletizing and PET bottle or full crates palletizing. We designed a system with two pallet storages (capacity 15 pallets each), and delivering them exactly where they need to get in the right moment.